進化したクララ、curara®4発表!産学官金融連携
進化したクララ、curara®4発表!

?超高齢化社会を迎え、歩行に障害のある方々をアシストするロボット技術の需要は年々高まり、ロボットはリハビリや介護に欠かせないアイテムになっています。本学が「体内埋め込み型歩行アシストサイボーグプロジェクト」の一環で紹介してきた歩行アシストロボット「ロボティックウェアcurara?(クララ)」も、ここで4号機への進化を遂げました。装着面や周辺機器の整備など、実際の利用を想定し「curara?4」は、加速度的に製品化に近づいています。

平成29年9月末の国際福祉機器展に先立って行われた、文部科学省情報ひろばラウンジでのニューモデル「curara?4」発表会の様子。報道機関と製品化に興味のある企業?団体の方、約80名が参加した。
ロボティックウェアcurara?(クララ)開発の歴史

?「着るロボット」と呼ばれる歩行アシストロボット「ロボティックウェアcurara?(クララ)」は、信州大学繊維学部橋本?塚原188bet体育_188bet备用网址室が2011年から2015年まで、科学技術振興機構(JST)A-STEPの支援、地域企業とのプロジェクトにより開発、2015年からは信州大学先鋭領域融合188bet体育_188bet备用网址群歩行アシストサイボーグプロジェクトでの開発を行ってきました。そして2016年からは東京都立産業技術188bet体育_188bet备用网址センターロボット産業活性化事業の支援も受けて進め、今年9月、文部科学省情報ひろばラウンジでの発表会や国際福祉機器展でのニューモデル「curara?4」発表となりました。
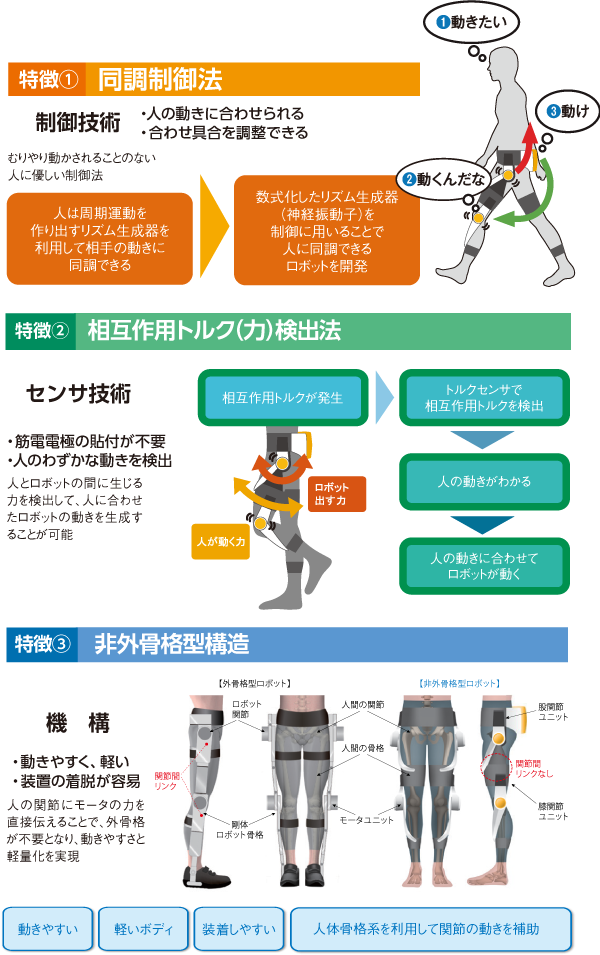
?生活動作支援のためのロボティックウェアcurara?(クララ)が他のロボットと違う大きな特徴は、人に優しい制御を実現する「同調制御法」、筋電電極が不要で人の関節のわずかな動きでも検出することができる「相互作用トルク(力)検出法」、着脱が容易で動きやすく、さらに軽いといった「非外骨格型構造」の3つで、モータの発生力を直接人の関節に伝えて補助するという、まったく新しい発想に基づく仕組みから「ロボティックウェア」と呼んでいます。
従来の高機能はそのままに装着感など実用性を追求!
?ニューモデル「curara?4」は、従来のモデルより軽量化、小型化を実現。実用性を重視し、さらにスタイリッシュなロボティックウェアに進化しています。
?股関節と膝関節の動きをサポートする機能を重視しリハビリテーションで大勢の方が装着し歩行訓練する場面などに活用できます。
リハビリ支援、生活支援、各種作業支援に確かな手ごたえ

ニューモデル「curara?4」は、3号機での実際の装着体験から多くの改善や工夫がなされています。このときの体験者からは、うれしい声が寄せられており、いくつかをご紹介します。
『想いをアシストしてくれる』(29歳男性)
 curara?を手に持つと、想像より軽く、装着感もズボンを「穿く」感じで、これがさらに小型?軽量化されれば「日常生活でも服を着る感覚で気軽に使える」と思いました。また、装着して歩いてみると、「歩かされる」という感じではなく、自身の動きに上手く同調して「一緒に歩いてくれる」感覚で、自然に近い歩行でした。今後も改良され、将来的には利用する方の「あの頃のように、もう少し遠くまで歩きたい」というような想いに応えてくれることを期待しています。
curara?を手に持つと、想像より軽く、装着感もズボンを「穿く」感じで、これがさらに小型?軽量化されれば「日常生活でも服を着る感覚で気軽に使える」と思いました。また、装着して歩いてみると、「歩かされる」という感じではなく、自身の動きに上手く同調して「一緒に歩いてくれる」感覚で、自然に近い歩行でした。今後も改良され、将来的には利用する方の「あの頃のように、もう少し遠くまで歩きたい」というような想いに応えてくれることを期待しています。『自然に歩ける面白いズボン』(93歳女性)
 curara?の試着を依頼されたときは、「変なロボットを体に着けるのは怖いな」と正直思いました。しかし、実際にcurara?を見てみるとロボットという感じではなく「コードが付いた面白いズボン」という印象でした。そのズボンを穿いて歩いてみると「足が動くのをズボンが自然に手伝ってくれる」という感じで、楽しく、楽に歩くことが出来ました。これからも改良は続くと思うので、実用化されたらぜひcurara?を穿いて「子供と一緒にお出掛けしたい」と思います。
curara?の試着を依頼されたときは、「変なロボットを体に着けるのは怖いな」と正直思いました。しかし、実際にcurara?を見てみるとロボットという感じではなく「コードが付いた面白いズボン」という印象でした。そのズボンを穿いて歩いてみると「足が動くのをズボンが自然に手伝ってくれる」という感じで、楽しく、楽に歩くことが出来ました。これからも改良は続くと思うので、実用化されたらぜひcurara?を穿いて「子供と一緒にお出掛けしたい」と思います。座ったままの装着が可能に、コントローラも小型軽量化、専用モバイル端末で楽々操作!
?ニューモデルとなる4号機の大きな特徴は、装着される方の実際の利用シーンを想定し、より快適に使用いただけるように、形状も機能も大きく進化している点です。2タイプのニューモデルをリリースした背景もそこにあります。
?まず、関節フレームを脚の前方で固定することで、座る時に関節フレームが邪魔にならなくなりました。また、コントローラの小型?軽量化を実現、体の重心位置に近い腰部に取り付けることができるようになったため、より安定した歩行も可能になりました。
?さらに、専用のモバイルデバイスで簡単に操作することができ、装着者が一人でも使用できるように改良されました。

特徴①
関節フレームの形状変更
関節フレームの硬い部分を脚の前で固定できるよう形状を改良しました。これにより、拘束感が軽減し、さらに自由で自然な歩行が可能となります。

特徴②
コントローラの小型?軽量化
コントローラ内の制御回路を小型?軽量化したことで、腰への装着が可能となりました。

特徴③
専用モバイルデバイスで操作
ワイヤレスの専用モバイルデバイスで、アシスト制御の開始/停止などの操作ができるようになりました。また、歩行時間や関節角度の計測も可能となり、自分の歩行を評価できます。

特徴④
専用の椅子に座り、ロボットの楽々着脱
専用の椅子に座り、関節フレーム固定用のベルトを止めれば装着完了!座ったまま装着ができ、装着者の負担は軽減されました。

充電器
(写真はスタンダードモデル)
特徴⑤
専用の充電器で安心充電
4号機に合わせて充電器も開発しました。2時間で充電が完了し、フル充電になると自動的に電源が切れるため安心です。

基本となるcurara?の3つの特徴再確認
?生活動作支援ロボティックウェアcurara?(クララ)が他のロボットと違う、3つの特徴「同調制御法」、「相互作用トルク(力)検出法」、「非外骨格型構造」を図解でおさらいします。
?開発が始まった当初より一貫して変わることのない根幹をなす技術です。
2019年の製品化、事業化を目指し、着実に開発進行中
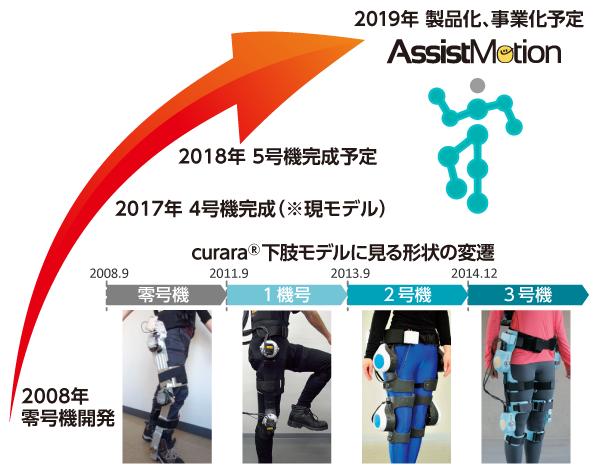
?curara?の歴史は、零号機を開発した2008年に遡ります。上肢モデル、下肢モデル、上下一体化モデルでそれぞれに材質の検討、モータやコントローラの小型?軽量化を進め、現在の4号機に至っています。
?今後の予定としては2018年度に最終モデルとなる5号機を完成させ2019年度の製品化、事業化の見通しです。この段階から信州大学発ベンチャー、アシストモーション社が事業を引き継ぐ予定となっています。
HOT?NEWS
神奈川県伊勢原市がタイアップ、山岳観光地「大山」で歩行アシストの実証実験!
?日本遺産である神奈川県伊勢原市の大山詣において、阿夫利神社までの参道に450段以上の階段があり、高齢者などの身体能力が低下した方にとって負担が大きく、参拝者の減少につながっています。
?そこで、伊勢原市からの依頼で、ロボティックウェアcurara?を用いて階段歩行を補助し、参道歩行者の負担が軽減するかどうかを確認するため実験を行うこととなりました。
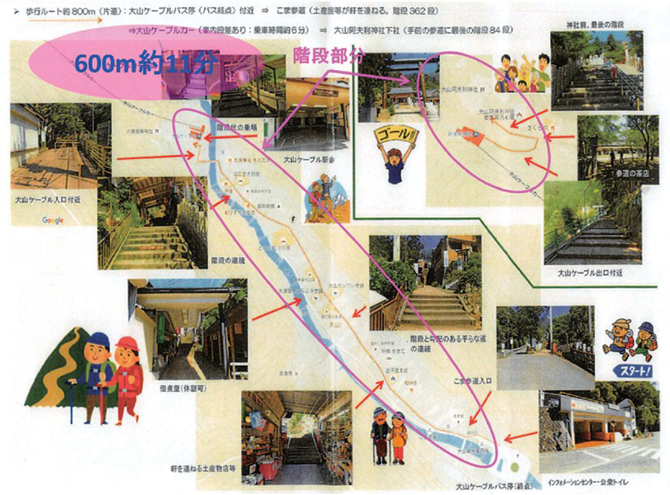
大山詣の参道の階段部分は600mあり、通常は約11分かけて歩く。
…実験結果が楽しみでもある。